ŌŧĄĒŅĄÔņĖâĢĻąūĖâđē 10ÐĄĖâĢŽÃŋÐĄĖâ 1.5 ·ÖĢŽđē 15 ·ÖĢĐ
1ĢŪA 2. D 3. A 4. B 5. B 6. B 7. C 8. C 9. D 10. B
ķþĄĒĖîŋÕĖâĢĻąūĖâđē 15 ļöŋÕĢŽÃŋŋÕ1·ÖĢŽđē 15 ·ÖĢĐ
1. Ô――Ó―üĢŽĖáļßēÉŅųÆĩÂĘ 2. 3FFHĢŽ200HĢŽ100H
3. ËŦČýÅÄ 4. ÎīÄĢĮåŋØÖÆđæÂÉĩÄÏĩÍģĢĻŧōēŧÐčŌŠŋØÖÆĩÄĢĐ
5. ÎÞ 6. ķāļöąģžŦĢŽļÃķÎÄÜ·ņÏÔĘū
7. ŌōΊKpēŧĩŦÓëąūÉíÓÐđØĢŽķøĮŌŧđšÍKd\KiÓÐđØ 8. ËŦđĶÄÜžü
9. ēŧŌŠĮóĘýŅ§ÄĢÐÍ 10. SPIÓÐČýĖõÏßĢŽķøI2CÖŧÓÐÁ―Ėõ I2CĩÄŨÜÏßĘĮËŦÏōĩÄĄĄ
ČýĄĒÅÐķÏĖâĢĻÕýČ·ĢŽÔÚĀĻšÅÄÚŧŪĄÅĢŽīíÎóĢŽÔÚĀĻšÅÄÚŧŪĻwĢŽēĒļÄÕýĢĻÖŧķÔīíÎóēŋ·Ö―øÐÐļÄÕýžīŋÉĢĐĢĻąūĖâđē5ÐĄĖâĢŽÃŋÐĄĖâ2·ÖĢŽđē10·Ö ĢĐ
1. īðĢšĻwĢŽēŧÄÜ 2. īðĢšĄÅ
3. īðĢšĄÅ 4. īðĢšĻwĢŽÔŌōĘĮÁ―īÎēÉŅųĩÄąäŧŊÁŋĄũYĖŦīó
5. īðĢšĄÅ
ËÄĄĒžōīðĖâĢĻąūĖâđē4ÐĄĖâĢŽÃŋÐĄĖâ5·ÖĢŽđē20·ÖĢĐ
1. īðĢš°ëĩžĖåķā·ŋŠđØĩÄĖØĩãĘĮĢšĢĻīð5ĖõžīŋÉĢĐ
ĢĻ1ĢĐēÉÓÃąęŨžĩÄËŦÁÐÖąēåĘ――áđđĢŽģßīįÐĄĢŽąãÓÚ°ēÅÅĢŧ
ĢĻ2ĢĐÖą―ÓÓëTTLĢĻŧōCMOSĢĐĩįÆ―ÏāžæČÝĢŧ
ĢĻ3ĢĐÄÚēŋīøÓÐÍĻĩĀŅĄÔņŌëÂëÆũĢŽĘđÓ÷―ąãĢŧ
ĢĻ4ĢĐŋÉēÉÓÃÕýŧōļšËŦžŦÐÔĘäČëĢŧ
ĢĻ5ĢĐŨŠŧŧËŲķČŋėĢŽÍĻģĢÆäĩžÍĻŧōđØķÏĘąžäÔÚ1msŨóÓŌĢŽÓÐÐĐēúÆ·ŌŅīïĩ―žļĘŪĩ―žļ°ŲÄÉÃëĢĻnsĢĐĢŧ
ĢĻ6ĢĐĘŲÃüģĪĢŽÎÞŧúÐĩÄĨËðĢŧ
ĢĻ7ĢĐ―ÓÍĻĩįŨčĩÍĢŽŌŧ°ãÐĄÓÚ100WĢŽÓÐĩÄŋÉīïžļÅ·Ä·Ģŧ
ĢĻ8ĢĐķÏŋŠĩįŨčļßĢŽÍĻģĢīï109WŌÔÉÏĄĢ
2. īðĢšÎĒ·ÖĩÄŨũÓÃĘĮžÓŋėĩũÕûËŲķČĄĢÓÉÓÚÎĒ·ÖÖŧīæÔÚÓÚËēžäĢŽŌōķøÓÐĘąŧáĘđÏĩÍģēúÉúÕðĩīĢŽķøĘđĩũ―ÚÆ·ÖĘÏÂ―ĩĄĢΊÁËąÜÃâÕðĩīĢŽÔÚŌŧÐĐÏĩÍģÖÐēÉÓÃēŧÍęČŦÎĒ·ÖËã·ĻĢŽËüĩÄŧųąūËžÏëĘĮĘđÎĒ·ÖŨũÓÃÂþÂþžõČõĢŽŌÔąÜÃâÓÉÓÚÎĒ·ÖÍŧČŧÏÂ―ĩĩ―0ķøēúÉúÕðĩīĄĢ
3. īðĢšPWMĘĮÂöģåŋíķČĩũËŲÏĩÍģĢŽËüÓÃĀīŋØÖÆÂíīïĩÄŨŠËŲšÍ·―ÏōĄĢÆä·―·ĻĘĮÍĻđýļÄąäķÔĩįŧúĩÄÍĻĩįĘąžäīïĩ―ĩũÕûĩįŧúŨŠËŲĩÄÄŋĩÄĄĢūßĖåŨũ·ĻĘĮĢŽĘŨÏČļųūÝĩįŧúŨŠËŲĩÄŌŠĮóĢŽČ·ķĻÕžŋÕąČĢŽžīÍĻĩįĘąžäÓëÍĻĩįÖÜÆÚÖŪąČĢŽÔŲ°īÕÕÍĻĄĒķÏĩįĘąžäËÍģöŋØÖÆÄĢÐÍĢŽĘđĩįŧú°īŌŠĮóĩÄŨŠËŲÔËŨŠĄĢ·―ÏōĘĮÍĻđýļÄąä4ļöŋŠđØĩÄÍĻĩįŨīĖŽĀīĘĩÏÖĩÄĄĢ
4. īðĢšËãĘõÆ―ūųÂËēĻÃŋŌŧīÎēÉŅųÖĩËųÕžĩÄąČĀýūųÏāĩČĢŧŋÉÓÃÓÚČΚÎģĄšÏĢŽČįŅđÁĶĄĒÁũÁŋĩČĄĢžÓČĻÆ―ūųÂËēĻÔōÃŋīÎēÉŅųÖĩËųÕžĩÄąČĀýēŧĩČĢŽŋÉŌÔÍŧģöÄģÐĐēŋ·ÖĢŽĘđÆäËųÕžĩÄąČĀýÔöīóĢŽĩŦļũīÎēÉŅųĩÄÏĩĘýŨÜšÍΊĄÆCi=0ĢŧÕâÖÖÂËēĻÖũŌŠÓÃÓÚÄĮÐĐÏëÍŧģöēÉŅųĩÄÄģÐĐēŋ·ÖĩÄģĄšÏĄĢķøŧŽķŊÆ―ūųÂËēĻÔōĘĮÃŋīÎÖŧļüÐÂŌŧļöēÉŅųÖĩĢŽŌōķøēÉŅųËŲķČŋėĄĢīËÂËēĻÖũŌŠÓÃÓÚĘĩĘąÐÔŌŠĮóąČ―ÏŋėĩÄģĄšÏĄĢ
ÎåĄĒÉčžÆĖâĢĻąūĖâđē1ÐĄĖâĢŽđē20·ÖĢĐ1.
īðĢšĢĻ1ĢĐÍžÖÐA/DŨŠŧŧΊēéŅŊ·―Ę―ĢĻ3·ÖĢĐ
ĢĻ2ĢĐÐīģöÍžÖÐ8255AĩÄĩØÖ·ĄĢĢĻ4·ÖĢĐ
G1 G2A G2B C B A
P2.7 P2.6P2.5 0 P2.4 P2.3 P2.2 P2.1 P2.0
1 1 1 0 1 1 0 X X
 Y6 Y6
ËųŌÔ,8255AĩÄĩØÖ·ĘĮ:F800HĄŠFB00H(ŧō:F8FFHĄŠ6BFFH)
ĢĻ3ĢĐŧģöĘĩÏÖļÃA/DŨŠŧŧĩÄÁũģĖÍžČįÏÂĢĻ5·ÖĢĐ
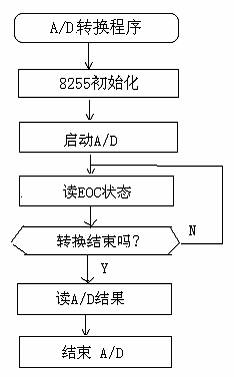
STARTĢšMOV AĢŽ#82H Ģŧ8255ģõĘžŧŊ 2·Ö
MOV DPTRĢŽ#0FB00H
MOVX @DPTR.ĢŽA
MOV AĢŽ#09H ĢŧÆôķŊA/D 2·Ö
MOVX @DPTR.ĢŽA
MOV DPTRĢŽ#0F900H
LOOPĢšMOV DPTRĢŽ#0FA00H
MOVX AĢŽ @DPTR ĢŧÅÐķÏŨŠŧŧĘĮ·ņ―áĘø 2·Ö
ANL AĢŽ#01H
JZĢŽLOOP
DEC DPH
MOVX AĢŽ@DPTR ĢŧķÁA/DŨŠŧŧ―áđû 2·Ö
END START
ÁųĄĒÉčžÆĖâĢĻąūĖâđē1ÐĄĖâĢŽđē20·ÖĢĐ
īðĢšĢĻ1ĢĐÐūÆŽ4N25ÓÃĀīļôĀëĢĻ2·ÖĢĐ
ĢĻ2ĢĐËĩÃũÍžÖÐĩįŧúĩÄŋØÖÆÔĀíĢĻ4·ÖĢĐ
ÍžÖÐĢŽŋŠđØK0ĄŠK7ΊļøķĻÖĩĢŽÓÃĀīļøķĻÂíīïĩÄŨŠËŲĢŽV=VmaxĻwN/256ĢŽŋŠđØKÓÃĀīŋØÖÆÍĢÖđĢĻ0ĢĐ/ÆôķŊĢĻ1ĢĐĄĢĩąPC4ĘäģöΊ1ĘąĢŽđâĩįļôĀëÆũĩžÍĻĢŽ·ĒđâķþžŦđÜÁÁĢŽđâÃôČýžŦđÜĩžÍĻĢŽÂíīïŋŠĘžŨŠķŊĄĢÍĻđýŨŠķŊNĢŽÔŲÍĢÖđNÂöģåŋíķČĩũÖÆžžĘõĢŽžīŋÉŋØÖÆÂíīïĩÄËŲķČĄĢ
ĢĻ3ĢĐŧģöĩįķŊŧúŋØÖÆģĖÐōÁũģĖÍžĢĻ4·ÖĢĐ

ĢĻ4ĢĐļųūÝÁũģĖÍžąāÐīĩįŧúŋØÖÆģĖÐōĢĻ8·ÖĢĐ
MAINĢšMOV AĢŽ#81H Ģŧ8255ģõĘžŧŊ 2·Ö
MOV DPTRĢŽ#8003H
MOVX @DPTR.ĢŽA
LOOPĢšMOV DPTRĢŽ#8002H
MOVX AĢŽ @DPTR ĢŧÅÐķÏĘĮ·ņÍĢÖđÂíīï 2·Ö
ANL AĢŽ#02H
JZĢŽSTOP
STARTĢšMOV AĢŽ#90H ĢŧÆôķŊÂíīïĢŽÖļĘūĩÆÁÁ 2·Ö
ĢĻMOV DPTRĢŽ#8002HĢĐ
MOVX @DPTR.ĢŽA
AJMP LOOP
STOPĢšMOV AĢŽ#00H ĢŧÍĢÖđÂíīïĢŽÖļĘūĩÆÃð 2·Ö
ĢĻMOV DPTRĢŽ#8002HĢĐ
MOVX @DPTR.ĢŽA
AJMP LOOP
ĢĻ5ĢĐÍžÖÐ4N25·ĒđâČýžŦđÜĩÄĩįÔīÓĶĩĨķĀđĐĩįĢŋĢĻ2·ÖĢĐ
|